


2024广汽科技日上,广汽率先发布了无图纯视觉智驾系统,并计划搭载在广汽下一代车型上。广汽自此成为国内首家推出无图纯视觉智驾系统的车企,确立了自身在国内无图纯视觉智驾领域的领先地位。
一、摄像头和高精地图,到底谁更智能
高精地图在国内发展缓慢,覆盖的区域集中在高速路、城市快速路和一线大城市,不具有普适性,且更新速度慢,大大限制了智驾功能的应用;而激光雷达作为感知传感器,虽然探测精度高,但成本较高,很难在20万元及以下车型实现搭载,且存在维修困难等问题。
摄像头作为感知传感器,就像人的眼睛一样,人类可以依靠眼睛准确收集路况信息,理论上摄像头也具有这样的能力,这也是为什么很多人相信,无图纯视觉将会是智能驾驶的更优解决方案。但无图纯视觉方案实现起来更难,需要更强大的技术能力和更复杂的数据处理能力支撑。

广汽无图纯视觉智驾系统依靠纯视觉技术和人工智能算法,可实现复杂多变全场景智能驾驶
难点一是摄像头看到的只是2D平面图像,而车辆实际处于一个立体空间,这就需要利用技术将摄像头收集到的2D画面转为3D真实世界,而激光雷达则能轻松解决这一问题,这是很多车企依赖激光雷达的原因。难点二是摄像头对距离的感知较弱,但智能驾驶需要精确定位到自车和其他障碍物,这也是为什么很多车企优先选择了高精地图+激光雷达方案。
难归难,但并不是没有办法解决。广汽无图纯视觉智驾系统基于多路相机输入的BEV+Transformer感知框架,不依赖高精地图和激光雷达,以更低成本实现全地域覆盖,不仅“识别准”,还能更进一步实现“决策准”。
基于多路相机输入的BEV+Transformer感知框架
二、以先进算法“脑补”上帝视角,交通状况尽收眼底
根据智能驾驶第一性原理,智驾系统要越来越“像人一样去驾驶”。人类驾驶员对于交通状况的判断远不止“所见”,还包含“看见”背后基于大量知识、信息的“主动思考”。广汽无图纯视觉智驾系统可以实现像人类驾驶员一样从“所见”到“脑补”的全过程,精确描绘出整个交通状况。
(一)所见即所行,知道“我在哪”
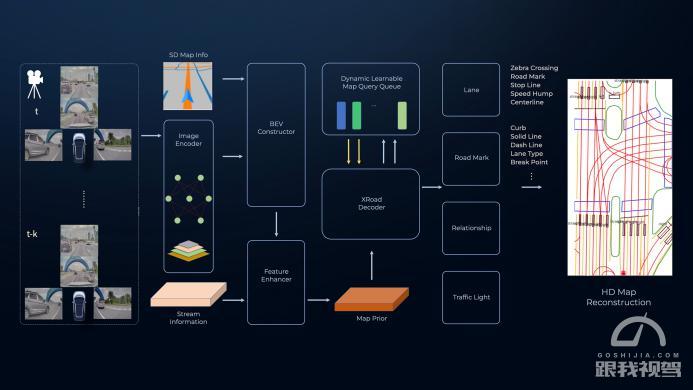
作为一个智慧的驾驶系统,需要随时清楚地知道“我在哪”,才能构建出接下来的驾驶方案。广汽无图纯视觉智驾系统基于广汽自研的道路感知多任务模型xRoadNet,匹配先进的人工智能算法,对摄像头拍到的图像特征进行提取、融合,并转换到3D空间里。这样一来,智驾系统就建立了3D坐标,确立了空间和位置,也因此具备了感知道路环境的识别能力,让人类肉眼看到的世界在智驾系统实时数字化地呈现,从而实现了智驾系统精准理解复杂交通道路的可能性,具备知道“我在哪”的能力。
在确认“我在哪”的过程中,就包括了智驾系统对各种各样的道路交通标志和标线、交通信号灯以及匝道、隧道、分岔路等的识别,并且能够准确地绑定交通信号灯和车道。特别是遇到道路中没有划线的路口,广汽无图纯视觉智驾系统能够“脑补”出对应的拓扑线,并主动构建出车道级的拓扑关系,即智驾系统会基于整体数据流做出逻辑判断,具备了思考能力,从而实现了在线构建“高精地图”的能力。

广汽无图纯视觉智驾系统可实现交通信号灯等跟具体车道的正确绑定
(二)清楚“身边都有谁”,让决策有据可依
面对道路上各式各样的“障碍物”,智驾系统需要清晰识别出对方是“谁”,才能决定下一步该跟随、该避让还是该超车。广汽自研的障碍物感知多任务模型xPercFormer,实现了占据网络技术自研“从0到1”的突破,让智驾系统具备了识别异形障碍物的能力;并在图像识别过程中加入了时间维度,用以“侦测”道路上每一个移动的目标,对行人、骑手、车辆等运动轨迹进行追踪,从而实现对他们的行为意图进行“预判”,作为决策车辆下一步动作的依据。
广汽无图纯视觉智驾系统感知精度高,50米内纵向误差小于1%,横向偏差小于0.5%;感知范围也非常广,车前超150米,车后100米,左右50米,相当于3个足球场面积。目前,广汽无图纯视觉智驾系统支持6种行为意图的识别、移动目标未来8秒运动轨迹的预测,具备了清晰知道“我周边都有谁”的识别能力。
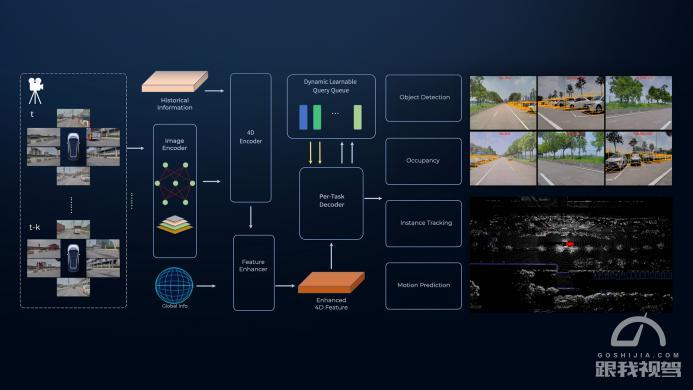
广汽自研的障碍物感知多任务模型xPercFormer
三、“车技”堪比老司机,平稳舒适、安全可靠
老司机开车总是从容不迫、平稳舒适,还能准时抵达目的地,让乘客安心感十足。这背后是他们老道的经验判断、理性的交通理解以及精湛的驾驶技艺。广汽无图纯视觉智驾系统在全球领先的AI算法加持下,可以实现像老司机一样地理解交通、理性决策、合理规划、平稳控制。
(一)和人脑一样会“预判”,规划“最佳路线”
广汽无图纯视觉智驾系统结合人工智能,通过广汽自研的基于XTracker的动态多目标跟踪和基于XPredFormer的运动轨迹预测两大方法,实现类似人眼的“看见”和人脑的“预判”。比如,当大货车从身边飞速驶过,变道超车,智驾系统可以提前预判,做到完美避让。
广汽无图纯视觉智驾系统还建立了数据驱动与专家规则协同的“决策大脑”。AI数据驱动不依赖高精地图,仅从普通导航地图获取实时导航指令,就能将环境感知与导航指令进行信息匹配。专家规则的搭配协同,确保了智驾系统规划过程中能够符合交通法规。采用人工智能和专家规则分别进行规划,融合输出最终决策的方法,目的就是制定出一条安全舒适的拟人化行驶轨迹,让这套智驾系统既能像老司机一样车技娴熟,又能遵守交通法规。
广汽无图纯视觉智驾系统可制定出一条安全舒适的拟人化行驶轨迹
(二)洞察车流中的“能量”,明白“我该怎么办”
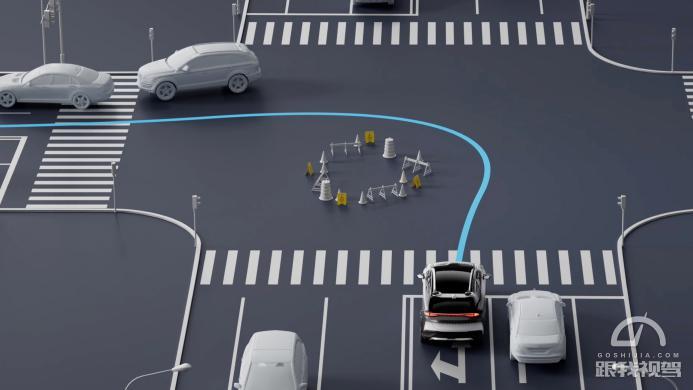
道路交通是一个多方行为博弈的复杂场景。川流的车道中,每两个动态物体间都不可避免地存在博弈的可能性。从大脑预判到方向盘操控,如何让每个交汇的场景都能处理得如流水般灵活?广汽首创了流体式时空联合规划技术,主要就是用来解决车辆和其它交通参与者之间的博弈问题。

广汽首创流体式时空联合规划技术
当车辆想借道绕行时,旁边的车辆不礼让该怎么办?大货车遮挡视线,如何正确判断变道超车时机?流体式时空联合规划技术将整个动态变化的交通场景看作一个“流场”,流场中每个障碍物都会产生不同的扰动,扰动大时会产生即时远离信号,扰动小时就会进行预防性避让。在流体式时空联合规划技术的支撑下,广汽无图纯视觉智驾系统就能实现在车辆交汇、博弈场景中,像流水一样流畅地绕开危险、灵活处理不同的扰动因素,解决智驾系统中“我该怎么办”的决策难题。
(三)高效运行丝滑控制,“我”就是老司机
智能驾驶操作系统的核心目标是保证整个功能链路上所有功能按照规定的顺序在规定的时间正确执行,这便涉及到任务的调度、数据的通信以及算法逻辑本身等多个方面。为了保证智能驾驶系统在任何情况下都能安全、可靠、高效地运行,广汽专门为智能驾驶设计了操作系统Garcia OS。Garcia OS提供了图模型计算框架、全局确定性调度、安全高效可靠通信模组等模块,让智能驾驶在各种复杂多变的场景下,算法运算均能正确有序地执行,大量数据能在不同的硬核引擎间、进程间高效可靠地通信。在Garcia OS的支撑下,广汽无图纯视觉智驾系统实现了智驾任务从不确定到确定、从局部最优到全局最优的性能提升,保障了智驾系统运行的绝对安全。
除此之外,广汽无图纯视觉智驾系统在控制端还采用了模型预测控制算法,能根据车辆行驶轨迹的决策和规划,调配不同的动力学模型进行支撑,让车辆行驶更为丝滑。比如,当车辆正常直线行驶时,智驾系统会采用简单的动力学模型,以节约算力资源;而在调头、急弯等转向幅度较大的行驶路线上,智驾系统则会调用复杂程度更高的动力学模型进行支撑,当控制端下达方向转角、加速、制动力度等指令时,智驾系统便能综合考虑车辆侧倾等影响车身姿态的参数,从而带来更为平稳舒适、安全可靠的驾乘体验。

广汽无图纯视觉智驾系统将开启一个自由的智驾新时代
当大多数车企还在追逐高精地图和激光雷达的时候,广汽已经把目光投向了无图纯视觉技术领域。虽然起步很难,但广汽X Lab自动驾驶团队最终克服了种种挑战,把技术做到了行业领先,率先实现了复杂多变全场景下的无图纯视觉智能驾驶。尽管未来仍有很多挑战,但可以期待,广汽无图纯视觉智驾系统将开启一个自由的智驾新时代。














评论
() 先登录 发表暂无评论
点击展开更多评论